EST Control System
Once constructed, EST will be one of the largest solar telescopes in the world. It will integrate a large number of complex elements that must be orchestrated to meet its scientific requirements. Figure 1 shows the main elements of the telescope that the EST Control System (ECS) will manage.
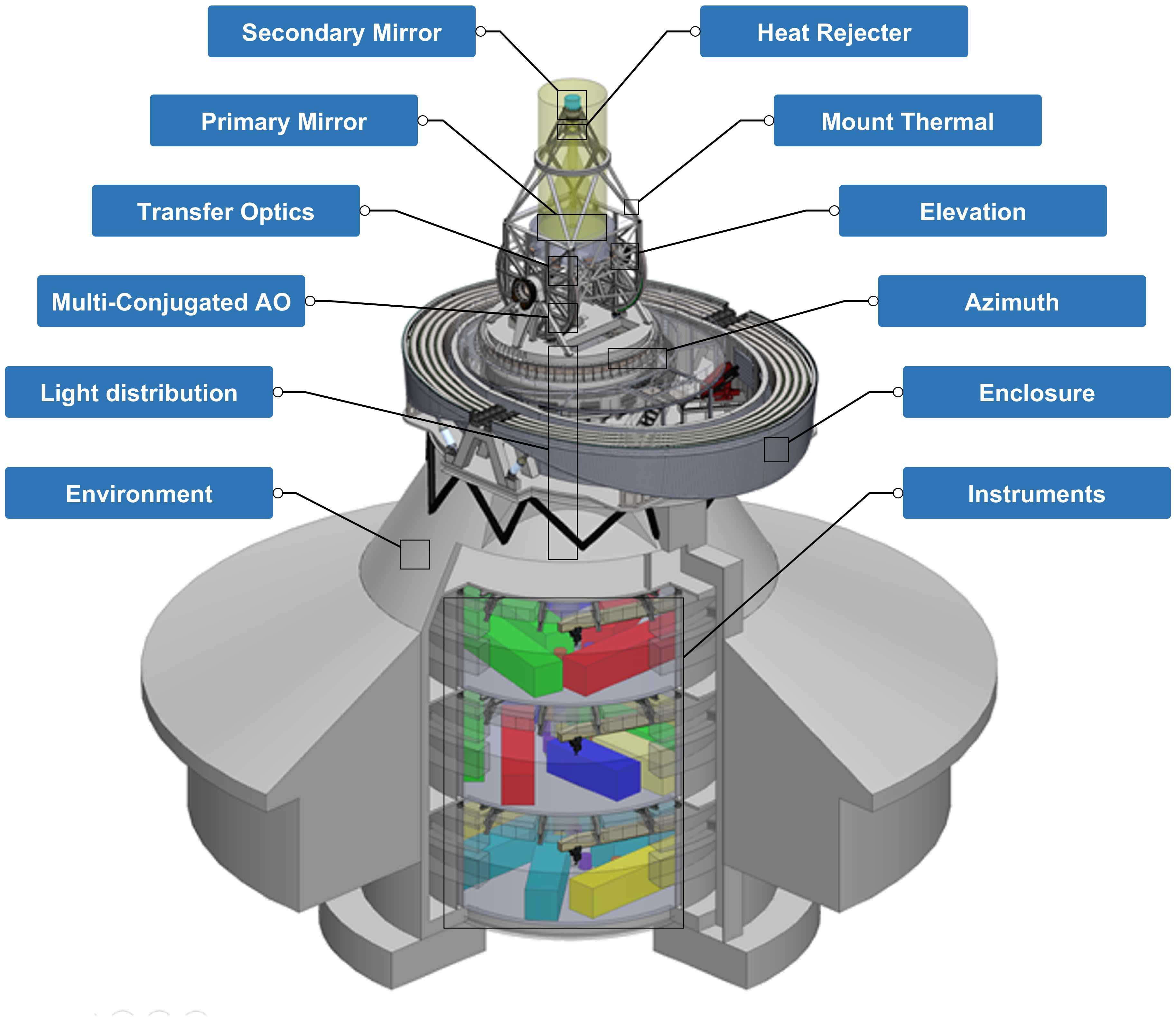 Figure 1. Main telescope elements controlled by the ECS
Figure 1. Main telescope elements controlled by the ECS
The control system of EST will be based on one of the largest nightime telescopes that has been operational for years, the Gran Telescopio Canarias (GTC). Together with the future New Robotic Telescope (NRT), all three telescope teams are collaborating to create a powerful basis for the control system.
The EST Control System (ECS) is designed as a distributed system, constituted by a set of independent nodes, interconnected by the ECS network (see Figure 2). Each of these nodes has its own physical resources and implements specific functionalities as an integrated component of the system, contributing to the global functionality of the telescope.
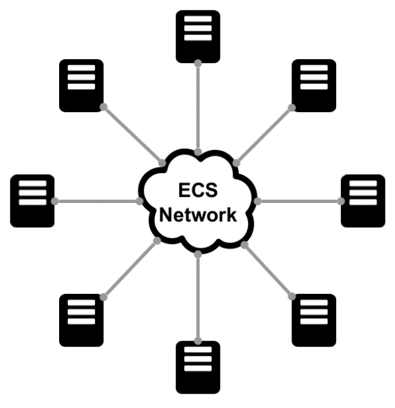 Figure 2. ECS distributed design
Figure 2. ECS distributed design
In order to coordinate and synchronise the operation of the telescope, the ECS offers a set of common services shared by all components of the system, as well as a set of operation services to operate the telescope. The ECS follows the Inversion of Control design, where the operation services manage, coordinate and synchronise the components required to perform the operations carried out by the telescope. Figure 3 illustrates the Inversion of Control design diagram.
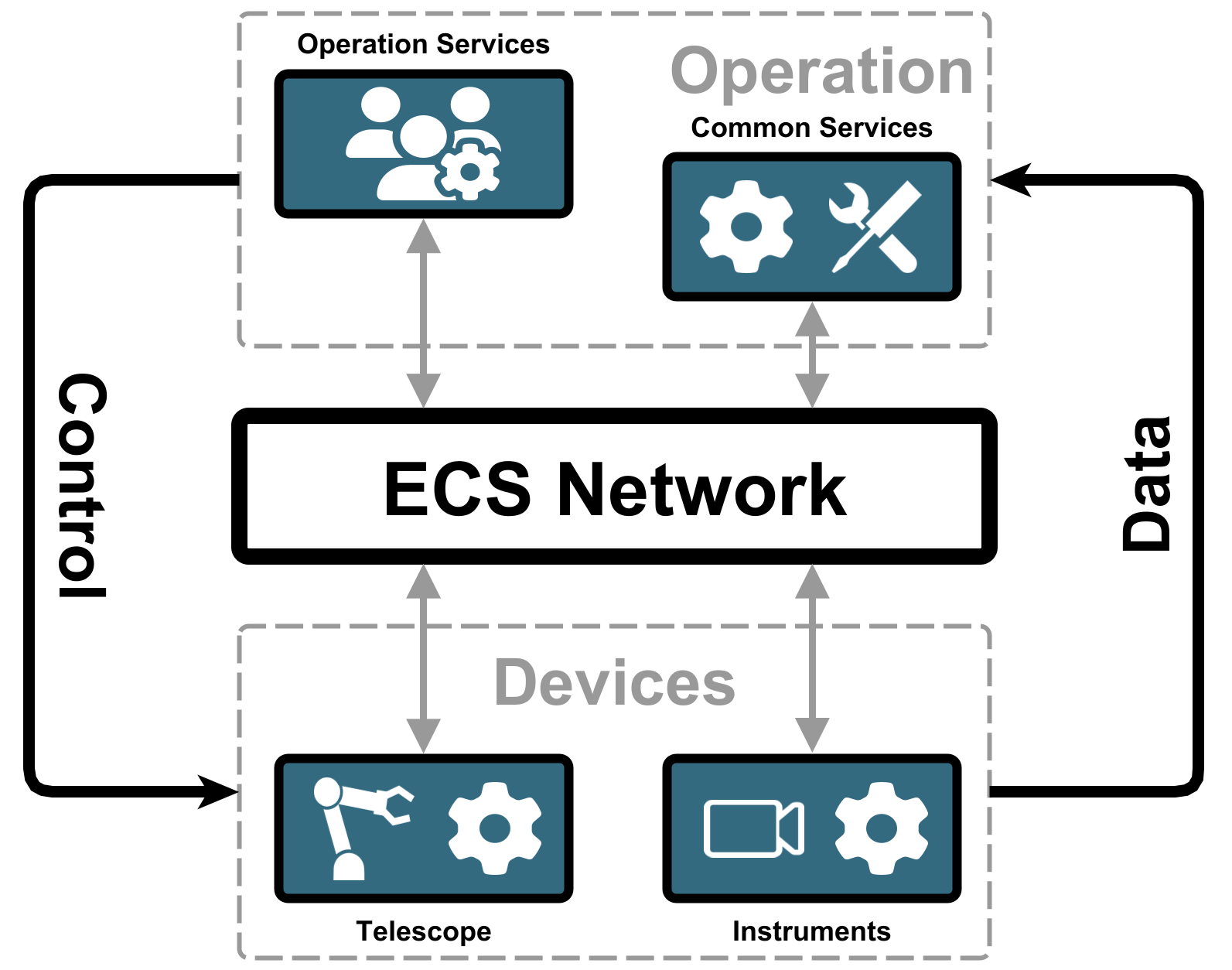 Figure 3. ECS operation flow
Figure 3. ECS operation flow
To integrate the independent components into the system, the design of the ECS architecture offers a set of frameworks that every component incorporates to follow the operation rules specified by the ECS. These, illustrated in Figure 4, include specifications for access to user interfaces, services, device management, and control and data flow.
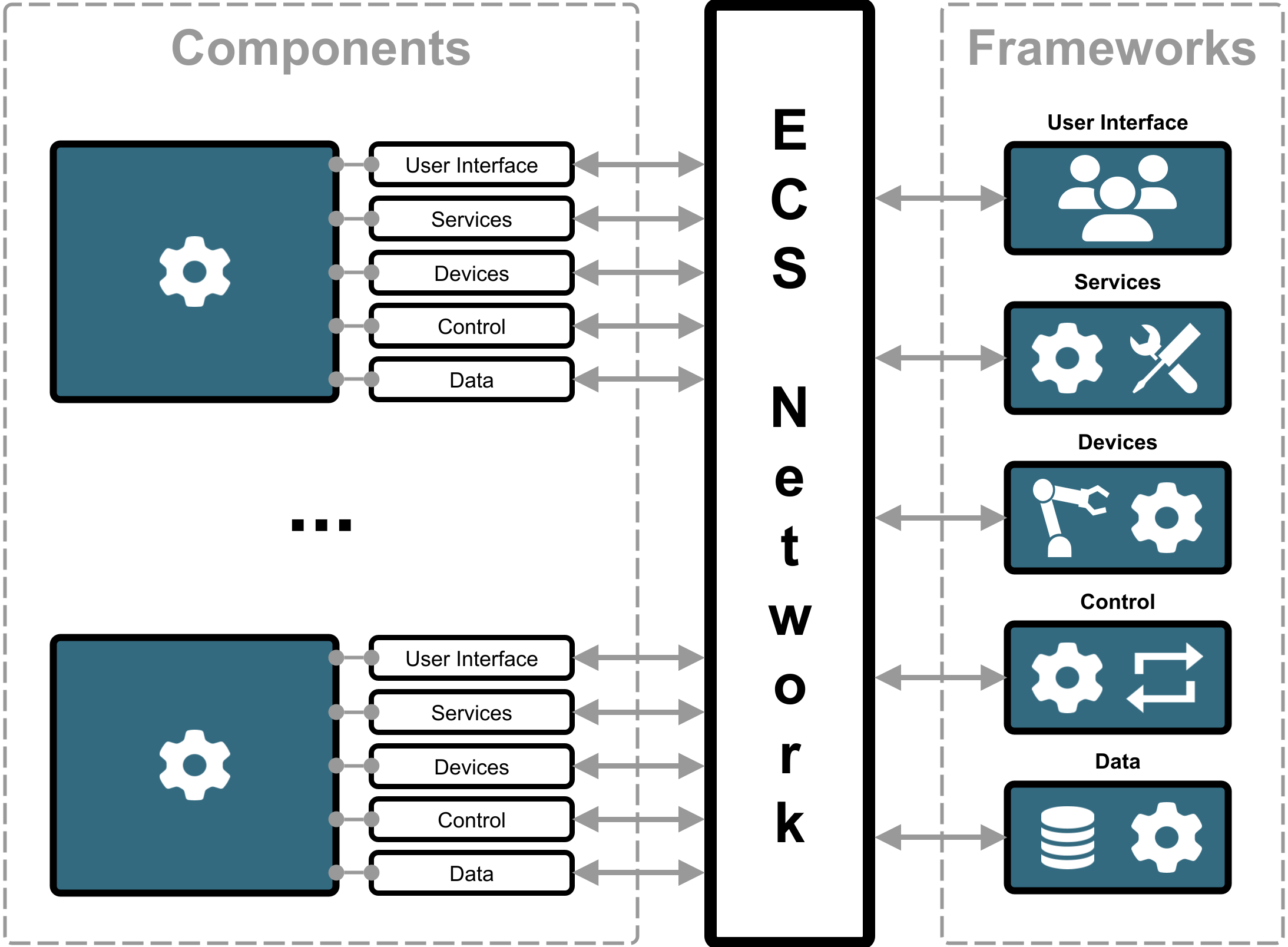 Figure 4. ECS component frameworks
Figure 4. ECS component frameworks
For the user interface framework, the engineering team is considering to use the latest front-end web-based technologies and tools to dynamically build the graphical user interfaces (GUI). One tool that the ECS will incorporate is PORIS, from the CosmoBots team. This will create the scientific panels of the instruments by using a graphical design modelling. Another solution being considered for the ECS is unifying the definition of the front-end elements that the components will use to interact with the users. The goal is to build and load them dynamically at execution time using different device supports. Figure 5 shows the flow followed by the UI framework using the proposed design tools.
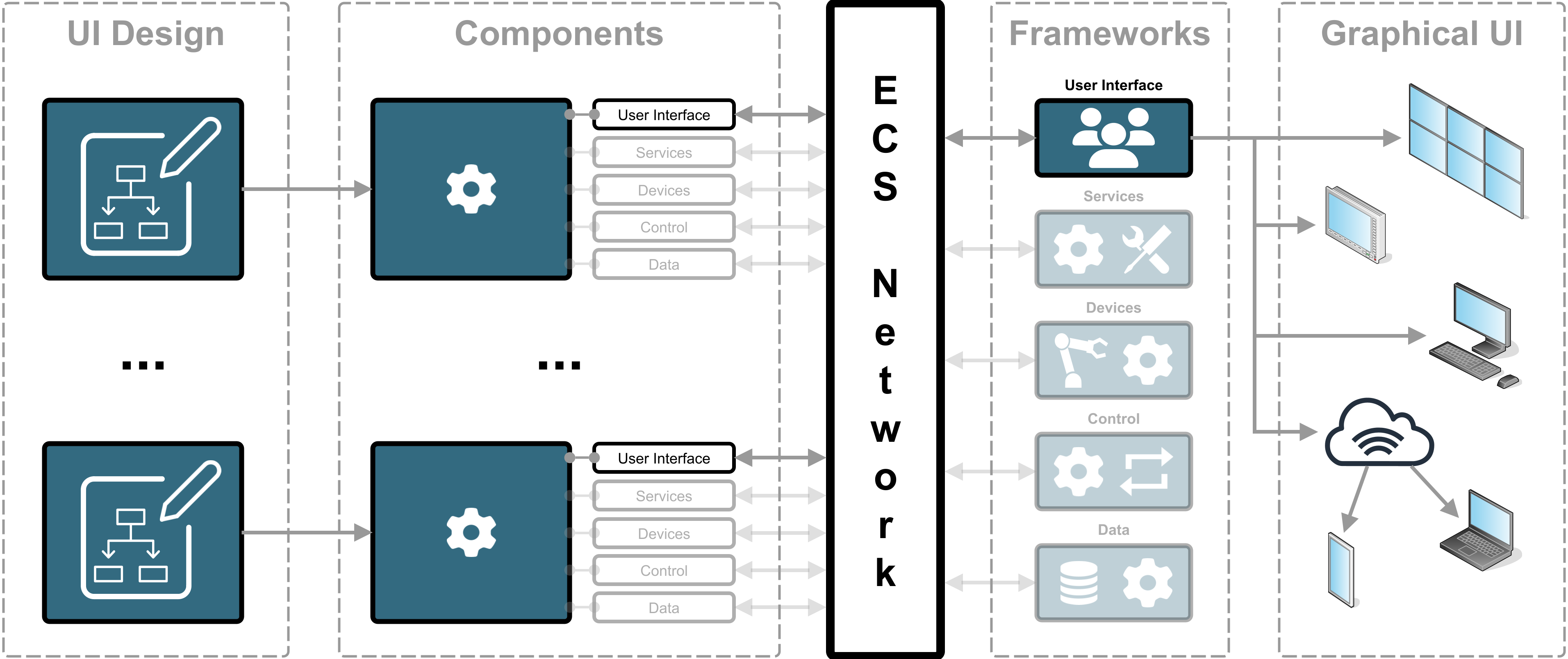 Figure 5. ECS user interface framework tools
Figure 5. ECS user interface framework tools
But the design of the EST control system must address several specific big challenges. On one hand, EST is expected to generate a substantial amount of data during the observations. On the other hand, EST will operate multiple sophisticated instruments simultaneously. The ECS has to deal with the challenge of handling an estimated amount of 30 PB (that is, 30 million GB) per day in the most challenging case when all the instruments are operating at the same time. Although it is still under discussion, the current design foresees parallel and distributed data processing, as illustrated in Figure 6. Instead of retrieving the data generated by the instruments and then processing them in the system, the instruments will process the data locally, performing the reduction and storing them locally until the ECS will handle and store the entire sets.
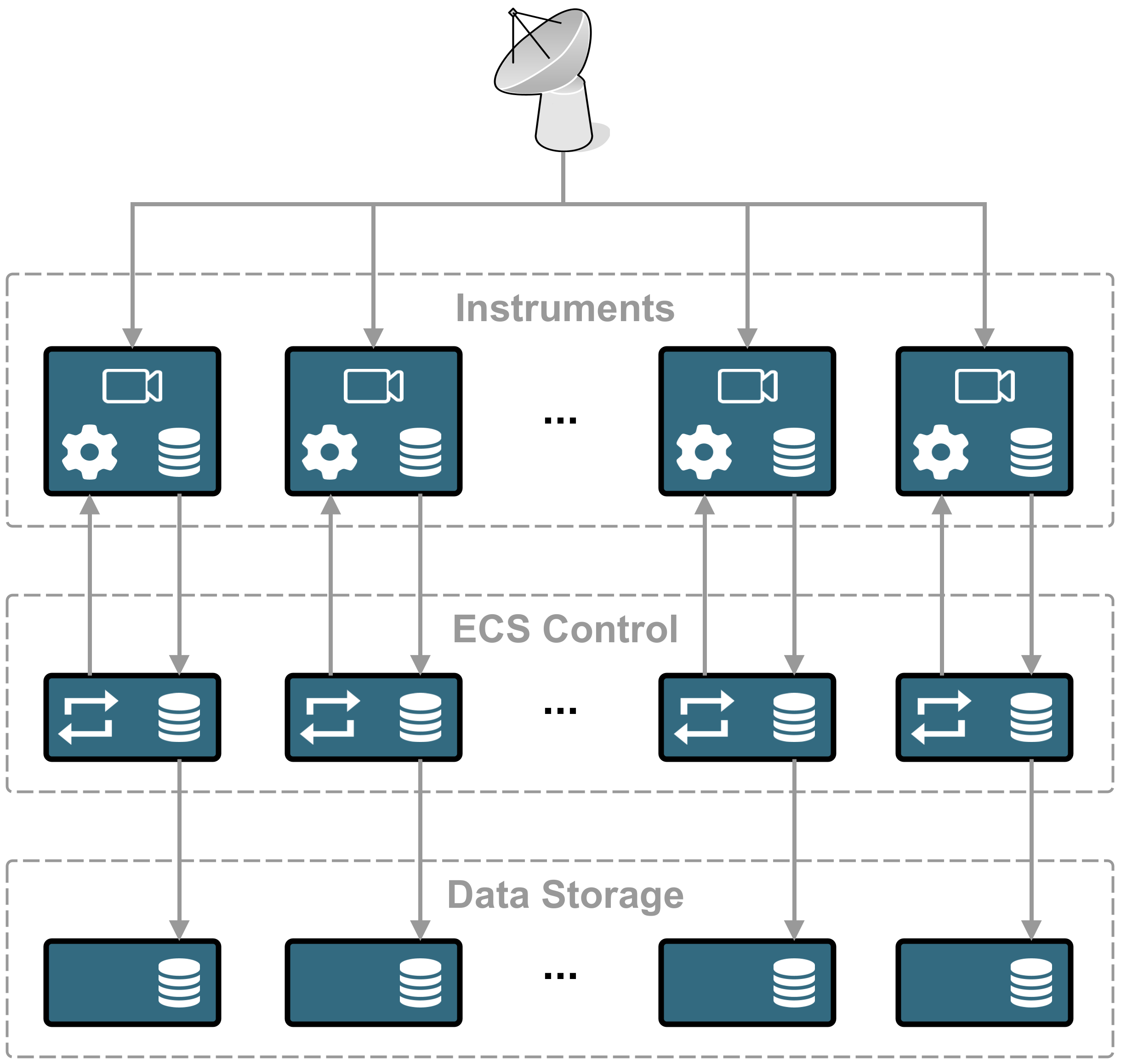 Figure 6. ECS data handling
Figure 6. ECS data handling
Furthermore, EST will be equipped with state-of-the-art optics technology, including a 4.2-metre active primary mirror with around 100 actuators, a 0.8-metre adaptive secondary mirror with around 2000 actuators, and a multi-conjugated adaptive optics (MCAO) system. The adaptive optics (AO) system is a high-performance, low-latency system expected to operate in real time to correct the perturbations generated by the atmosphere. To achieve this, the AO system has to read real time information from several components, process it, perform the calculations, and act on the different mirrors through thousands of actuators to deform their surface. It must also verify that the calculations and compensations are correct. The entire process has to be performed in, at most, one millisecond. To meet this requirement, the AO system will have a dedicated real-time system to control the required components and deliver the highest image quality to the instruments during observations. The EST control system will manage these components along with the rest of the observatory's elements. Figure 7 shows the current design of the integration of the optics elements with the different subsystems that use them and the rest of the system.
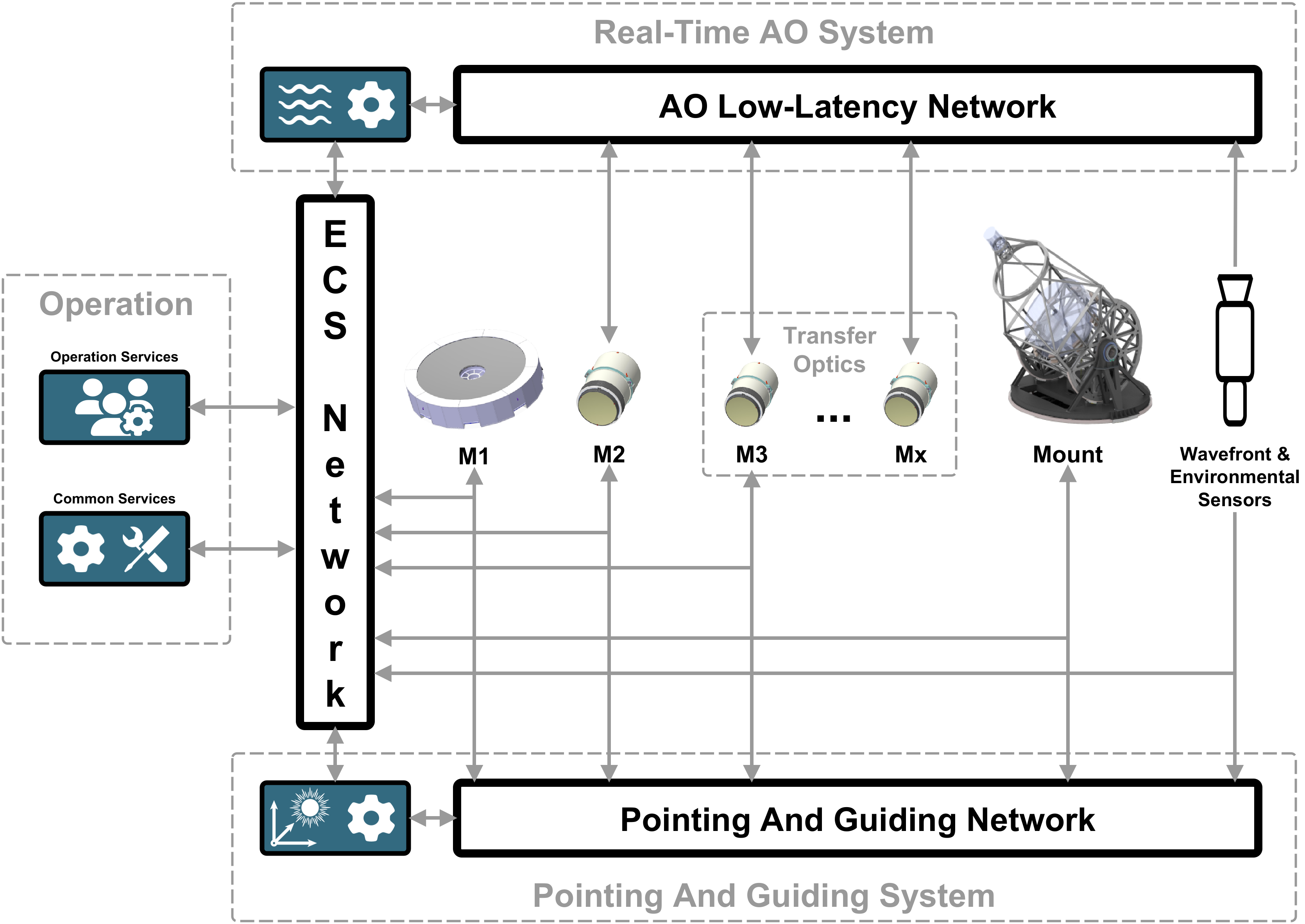 Figure 7. ECS optics design
Figure 7. ECS optics design
Considering all these aspects, the use of the latest developments in testing, integration, deployment, and front-end technologies is being evaluated in this design phase of the control system. All these elements are being developed and tested in the EST labs to create a control system that will be efficient and up to the needs of the telescope and its instruments.